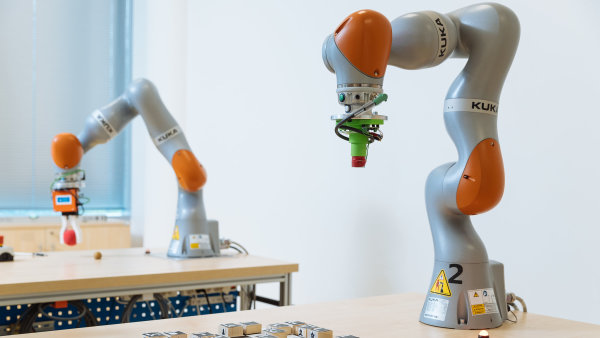
Na Mezinárodní kosmické stanici už se vystřídalo okolo dvou stovek astronautů z mnoha států - ale takový, jaký teď přiletěl s misí STS-133 raketoplánu Discovery, mezi nimi dosud nebyl. Jmenuje se Robonaut R2 a je to první humanoidní robot na oběžné dráze.
"Splnil se nám velký sen - vyrobit robotického pomocníka astronautů a dostat ho do vesmíru," řekl v den startu šéf jeho vývoje Ron Diftler. A velitel raketoplánu Discovery Steven Lindsey k tomu dodal: "Robonaut po nás chtěl křeslo na letové palubě, ale už nebylo volné místo. Poslali jsme ho do nákladového prostoru."
Zbývá vám ještě 90 % článku
První 2 měsíce předplatného za 40 Kč
- První 2 měsíce za 40 Kč/měsíc, poté za 199 Kč měsíčně
- Možnost kdykoliv zrušit
- Odemykejte obsah pro přátele
- Nově všechny články v audioverzi
Máte již předplatné?
Přihlásit se